Laboratory for Intelligent Sensing and Computing (LISC)

LISC has a 2021 Lexus RX450 Hybrid SUV (mounted with millimeter-wave high-resolution automotive imaging radars, stereo cameras, LiDAR, RTK GNSS and IMU) as vehicle platform for autonomous driving.
Millimeter-wave radar has been employed in automotive vehicles for advanced driver-assistance systems (ADAS) features, such as adaptive cruise control (ACC) and automatic emergency braking (AEB) since late of 1990s. In United States, AEB system will be a standard equipment in any new car by 2022. Recently automotive radar becomes one of key perception sensors for emerging autonomous driving, providing 360 degree environment sensing under all weather conditions. Automotive radar is a multi-billion-dollar market, which is the largest market for radar except defense. Differing from ground-based and airborne surveillance radars, automotive radars have a small size (multi-inch by multi-inch), short range (within multihundreds of meters), low power consumption (multiwatt), and low cost. They are integrated behind the vehicle bumper or windshield, operating in a highly dynamic environment with multipath.
S. Sun, A. P. Petropulu and H. V. Poor, “MIMO radar for advanced driver-assistance systems and autonomous driving: Advantages and challenges,” IEEE Signal Processing Magazine, vol. 37, no. 4, pp. 98-117, 2020. (Feature Article)
The current generation automotive radars for ADAS purpose have very limited performance. High resolution imaging radar systems with capability of generating point clouds are highly desired for Level 4 and Level 5 autonomous driving. Such high angle resolution cannot be achieved without hundreds of or even thousands of virtual array elements synthesized with MIMO radar technology.
Our research group is doing solid radar theory research, designing the cutting edge next generation automotive radar systems, and investigating novel machine learning methods for target identification using radar data. We have strong collaborations with industrial leaders in designing automotive radar chipsets and radar products, such as NXP Semiconductors, Texas Instruments, Aptiv, Uhnder, etc.
Current going on projects include
- Waveform Design: FMCW, PMCW, OFDM and Sparse Step Frequency Waveform (SSFW)
- High Resolution Imaging Radar Systems Cascaded with Multiple Radar Transceivers
- Novel Sparse Linear Array Synthesis and Optimization
- Efficient and Effective High Resolution Direction of Arrival (DOA) Estimation Algorithms
- Radar Interference Detection and Elimination (RIDE)
- Novel Machine Learning Methods for Target Identification Using Radar Data
- Sensor Fusion Strategies of Automotive Radar Data and Camera Imaging for Autonomous Driving
Imaging Radar System with Hundreds of Virtual Array Elements
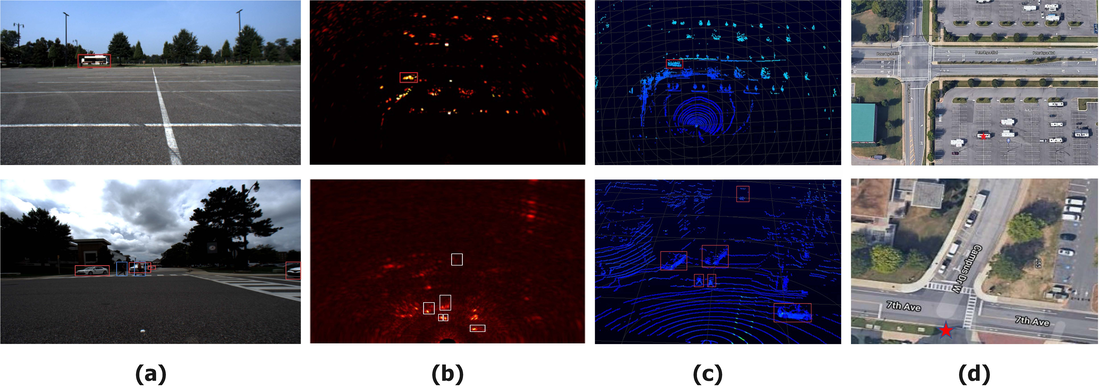
Field experiments with multi-modal sensors at The University of Alabama: (a) Camera images, (b): High resolution radar spectra in Cartesian coordinate system, (c): Velodyne Ultra Puck LiDAR 3D point clouds, (d): Google maps of the field experiment environment, where star red star denotes the sensors.
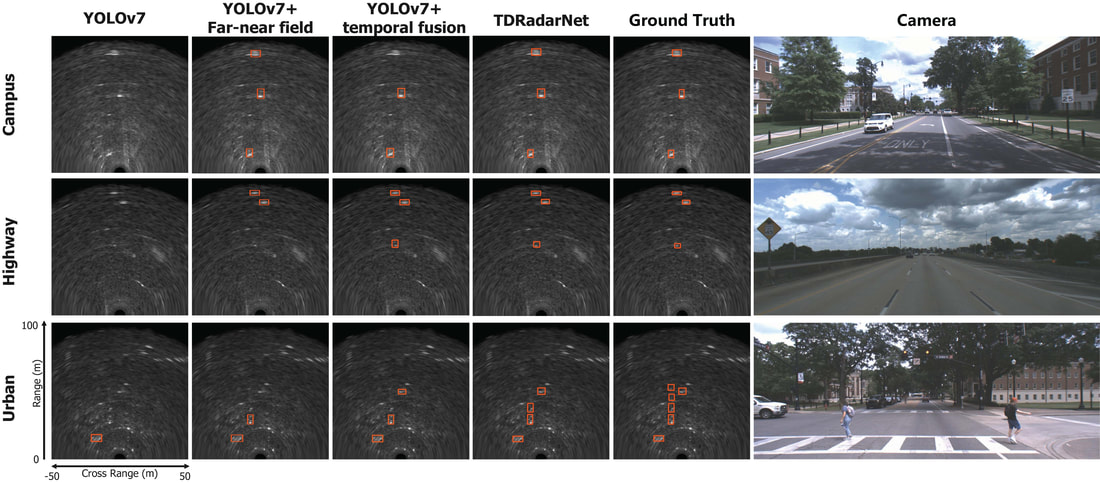
R. Zheng, S. Sun, H. Liu and T. Wu, ‘‘Deep neural networks-enabled vehicle detection
using high-resolution automotive radar imaging,” IEEE Transactions on Aerospace and Electronic Systems, 2023.
Funding
- PI: National Science Foundation, ‘‘CAREER: Towards Fundamentals of Adaptive, Collaborative and Intelligent Radar Sensing and Perception’’, 8/15/2024-7/31/2029, ($506K)
- PI: National Science Foundation, ‘‘CRII: CIF: A Sparse Framework Based Automotive Radar Sensing for Autonomous Vehicles’’, 5/1/2022-4/30/2025, ($175K)
- PI: NXP Semiconductors, ‘‘Advanced Automotive Radar Signal Processing Research”, 9/1/2020-12/31/2025, ($760K)
- PI: Spartan Radar, ‘‘High Resolution Imaging Radar Research”, 1/1/2022-12/31/2024, ($178K)
- PI: Mathworks, ‘‘Sparse Array Design for 4D Automotive Radar”, 1/1/2022-12/31/2023, ($73K)
- PI: The Alabama Transportation Institute (ATI), ‘‘Laboratory for Intelligent Sensing and Computing”, 10/1/2021-9/30/2022, ($50K)
- PI: The Alabama Transportation Institute (ATI), Graduate Student Support for 2021-2022 Academic Year, 8/16/2021-5/15/2022, ($35K)
- Co-PI: Camgian Microsystems, Inc, ‘‘Machine Learning for Object Classification and Localization with Counter Measures’’, 4/1/2021 −8/31/2022, ($138K, total $600K, PI: Dr. Kenneth Ricks)
- Co-PI: NOAA/UCAR, U.S. Dept. of Commerce, ‘‘Center for Remote Sensing of Snow and Soil Moisture’’ , 9/1/2019-8/30/2020, ($250K, total $5M, PI: Dr. Prasad Gogineni)
Sponsors

